Next: Four-point shear test Up: EXAMPLES Previous: EXAMPLES
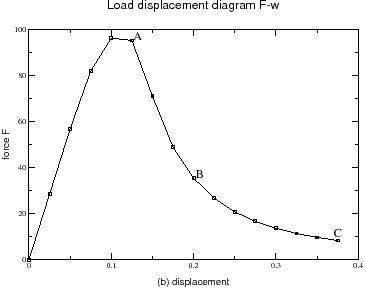
The formation of the process zone and failure of the specimen are simulated in 15 incremental steps, controled by imposed increments of the displacement under the applied load. The load-displacement diagram is shown in Fig. 3. Three solution strategies are compared:
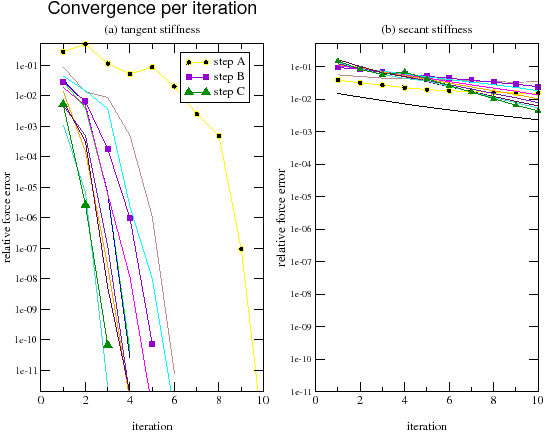
For the tangent stiffness, the convergence rate is quadratic, i.e., the convergence curves are approximately parabolic (Fig. 2a). The residual is then reduced to the level of machine precision within a few iterations, typically 3 to 6. The only exception is step 5 (around the peak of the load-displacement curve), in which the initial prediction is not sufficiently close to the exact solution, and the quadratic rate of convergence is attained only after iteration number 7.
The relative efficiency of the strategies using the secant or tangent stiffness
matrices strongly depends on the prescribed convergence tolerance.
For a relative tolerance
![]() , the number of iterations per step
using SSM-10 does not exceed 68; see Table 1. With TSM, the
number of iterations per step is at most 8, but each iteration is much more
costly. The secant stiffness matrix is symmetric and has a smaller average bandwidth
than the nonsymmetric tangent stiffness matrix. Moreover, the rate of convergence
is not substantially reduced if the secant stiffness
is assembled and factorized only once per every 10 iterations,
which results into additional savings. The tangent stiffness must be updated
in every iteration, otherwise the quadratic rate of convergence would be lost.
As shown in Table 2, the total time needed for the complete analysis using
SSM-10 is more than three times shorter than that needed by TSM with a direct solver.
For this small problem, an iterative solver would not be
advantageous. The assembly procedure takes 0.02
seconds for SSM-10 approach, while for TSM approach it takes between
0.02 to 1.2 seconds. The factorization time for SSM-10 approach is
constant, equal to 0.34 seconds, while for TSM approach it varies between
0.75 and 1.06 seconds.
, the number of iterations per step
using SSM-10 does not exceed 68; see Table 1. With TSM, the
number of iterations per step is at most 8, but each iteration is much more
costly. The secant stiffness matrix is symmetric and has a smaller average bandwidth
than the nonsymmetric tangent stiffness matrix. Moreover, the rate of convergence
is not substantially reduced if the secant stiffness
is assembled and factorized only once per every 10 iterations,
which results into additional savings. The tangent stiffness must be updated
in every iteration, otherwise the quadratic rate of convergence would be lost.
As shown in Table 2, the total time needed for the complete analysis using
SSM-10 is more than three times shorter than that needed by TSM with a direct solver.
For this small problem, an iterative solver would not be
advantageous. The assembly procedure takes 0.02
seconds for SSM-10 approach, while for TSM approach it takes between
0.02 to 1.2 seconds. The factorization time for SSM-10 approach is
constant, equal to 0.34 seconds, while for TSM approach it varies between
0.75 and 1.06 seconds.
The relative efficiency of SSM and TSM changes dramatically if a strict convergence
criterion is required. For a relative tolerance
![]() , the number
of iterations per step
using SSM-10 becomes excessive, and no improvement is obtained if the stiffness
matrix is updated after every 5 iterations; see Table 3. On the other
hand, TSM typically converges within 3 to 6 iterations, and only in one step it
needs 10 iterations. As a result, the total analysis with TSM is now more than
3 times faster than with SSM-10; see Table 2.
, the number
of iterations per step
using SSM-10 becomes excessive, and no improvement is obtained if the stiffness
matrix is updated after every 5 iterations; see Table 3. On the other
hand, TSM typically converges within 3 to 6 iterations, and only in one step it
needs 10 iterations. As a result, the total analysis with TSM is now more than
3 times faster than with SSM-10; see Table 2.
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
This example indicates that for a low accuracy the strategy using a secant stiffness matrix is numerically more efficient. For a high accuracy, the results illustrate the potential benefits of the tangent stiffness matrix. The overhead of storing the whole matrix instead of its symmetric part and of the more time-consuming solution procedure is more than compensated by very fast convergence.
![\begin{figure}
\begin{tabular}{ll}
(a) &
\epsfig {file=3pbt.geom.eps, width=120mm} [1mm]
(b) &
\epsfig {file=3pbt.mesh.eps, width=110mm}\end{tabular}\end{figure}](img14.gif)