Next: CONCLUSIONS Up: EXAMPLES Previous: Four-point shear test
As the last and computationally most demanding example,
the three-point bending test is simulated using a three-dimensional model.
The geometry and boundary conditions are shown in Fig. 6a.
The finite element mesh is generated using T3D [10].
It contains 6461 nodes and 33158 constant-strain tetrahedral elements;
see Fig. 6b.
The constitutive properties are set to: Young's modulus
![]() GPa, Poisson's ratio
GPa, Poisson's ratio ![]() , tensile strength
, tensile strength ![]() MPa,
strain controling the softening
MPa,
strain controling the softening
![]() , and nonlocal interaction radius
, and nonlocal interaction radius
![]() mm.
mm.
|
Solution strategies based on the SSM and TSM with either direct or iterative solvers
are exploited. The ESM would again lead to an excessive number of iterations.
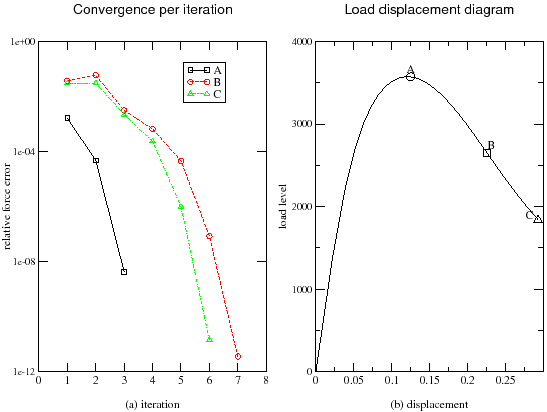
The TSM converges within 3 to 7 iterations; see Fig. 7a.
The basic information about the solution times in a high-accuracy
analysis is provided in Table 7. The assembly time for
SSM-10 is 1.3 seconds, for TSM with the direct solver using
skyline storage between 6.1 and 78 seconds, and for TSM with the
iterative solver using compressed row storage between 8.1 and 84.3
seconds. The factorization time for SSM-10 is 201.1 seconds,
and for TSM with direct solver between 620 and 2260 seconds. The solution
time for the iterative GMRES solver is between 16.8 and 37.3 seconds plus
the time needed for preconditioning, which is between 7.4 and 119.4 seconds.
Due to the high bandwidth of the
tangent stiffness matrix, emphasized by the three-dimensional character
of the mesh, the direct solver becomes quite expensive. With a direct
solver, the TSM strategy is about 5 times slower than the SSM strategy.
However, the GMRES iterative solver with preconditioning by incomplete
![]() decomposition leads to a dramatic acceleration and reduces the total
execution time by one order of magnitude. This is due to the fact that the
solver can profit from the high sparsity of the stiffness matrix.
The iterative
solver is not suitable for the secant stiffness matrix, because the number of
iterations is relatively high and the iterative solver cannot take advantage
of the fact that the stiffness matrix remains the same during a certain number of
iterations.
Thus, the best results are obtained with the
tangent stiffness and iterative solver, which illustrates the potential
of the proposed method in large three-dimensional problems.
decomposition leads to a dramatic acceleration and reduces the total
execution time by one order of magnitude. This is due to the fact that the
solver can profit from the high sparsity of the stiffness matrix.
The iterative
solver is not suitable for the secant stiffness matrix, because the number of
iterations is relatively high and the iterative solver cannot take advantage
of the fact that the stiffness matrix remains the same during a certain number of
iterations.
Thus, the best results are obtained with the
tangent stiffness and iterative solver, which illustrates the potential
of the proposed method in large three-dimensional problems.
![\begin{figure}\begin{tabular}{ll}
(a) &
\epsfig{file=3pbt3d.geom2.eps, width=120...
...[1mm]
(b) &
\epsfig{file=3pbt3d.mesh.ps, width=120mm}%
\end{tabular}\end{figure}](img5.png)